




目(mù)前的液位計檢定裝(zhuāng)置主要存在兩方麵的不足:一是多為實驗室測量(liàng)環境(jìng),而且多為橫向的檢尺(chǐ)台進行檢定,不(bú)能夠真實的模(mó)擬液位計的實際工作環境和工作(zuò)狀態;二是(shì)即使為豎向的檢定裝置(zhì),但量程一般不超過6米,與目前大型儲罐一般12~25 m相比,對(duì)液位計主(zhǔ)要量程的覆蓋不夠***。
儲(chǔ)罐用自動類型液位計是安裝在大型(xíng)儲罐上能夠自動連續測量(liàng)液(yè)體高度 (空高或液(yè)麵高度) 的儀表。由於液位計的計量性能關係到油品交接過程(chéng)中的準確程度,進而對單(dān)位的效益和(hé)安(ān)全有較大(dà)影響。如何能夠對不同廠商、不同類型、不同測量原理的液位計進行客觀、真實的檢定的需求變得日益迫切起來。我司通過大(dà)量調研液位計的現場應用工(gōng)況、液位(wèi)計產品的現狀,以(yǐ)及已有液位計檢定裝(zhuāng)置的檢定條件、檢定(dìng)方法,並綜合國際上對液位計產品的要求,研究並建立了(le)一套液位計(jì)標準裝置。本裝置的主要特點有:一是豎(shù)向檢定液位計,真實(shí)再(zài)現了液(yè)位計的實際工作狀態;二是標準裝置覆蓋的量程高可達(dá)25 m,滿足市場(chǎng)上儲罐用自動液(yè)位計的主要量程;三是采用激光幹涉儀作為主標準器,與一般的檢定裝置采用一級鋼直尺不同,具有非常高的準確度;四是采用自動控製係統進行全程的檢定數(shù)據采集、液位控製,自動化程度高。
1、液位(wèi)計標準裝置的組成:
液位計標準裝置由激光幹涉儀、自由態雙浮(fú)子和25 m高立式儲罐構成,如圖1所示。將激光幹涉儀的激光發射裝置安裝(zhuāng)在儲罐罐頂,激光發射器垂直向(xiàng)下發射,照準安裝在雙浮子中(zhōng)的全反射棱鏡。自由態雙浮子由內外浮子構(gòu)成,如圖2所示。內浮子內安裝全反射(shè)棱鏡(jìng),如圖3所示,可以反(fǎn)射儲罐頂部激光發射器所(suǒ)發(fā)出的(de)激光束,從而產生多普勒效應。內外(wài)浮子間通過支杆進行分(fèn)隔,從而保證(zhèng)內浮子隨液位進(jìn)行自由波動的同時,始終(zhōng)處於外浮子的內徑範圍。外浮子兩側設有吊耳,固定在(zài)儲罐上下的兩條導軌穿(chuān)過吊耳,從而約束雙浮子在水平方(fāng)向的運動範圍(wéi),保證內浮子內安裝(zhuāng)的全反射(shè)棱(léng)鏡能夠在量程範圍內反射激光(guāng)發射器所發出的激光束。儲罐內設有上下計量板,下計量板設為液位零點。當(dāng)液位變化時,全反射棱鏡在(zài)垂直方(fāng)向的位移即為液位(wèi)變化量。激光幹涉儀[3]通過測量全反射鏡移動時多普勒效應(yīng)引起(qǐ)的(de)頻率變化,從而得到這一時刻反射棱鏡的(de)移動速度,再(zài)計算出一(yī)段時間(jiān)內(nèi)全(quán)反射(shè)棱鏡的(de)位移,從(cóng)而得出液位測量值。通過將液位測量值與待檢液位計的測量(liàng)值在全量程範圍均勻選取幾個(gè)液位點(diǎn)作差(chà),從而得出待檢液位計的(de)***大允許誤(wù)差。
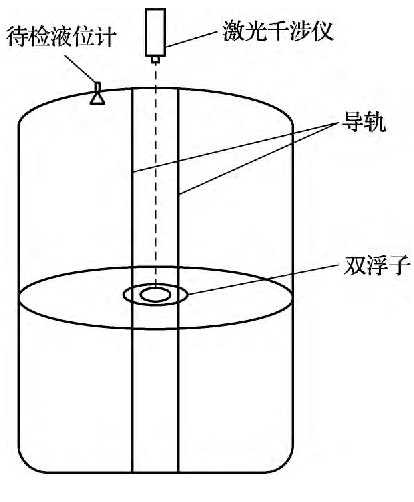
圖1 液位計標準裝置示意(yì)圖
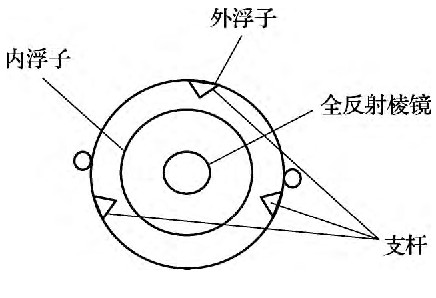
圖2 自由態雙浮子連接剖麵(miàn)示意圖(tú)
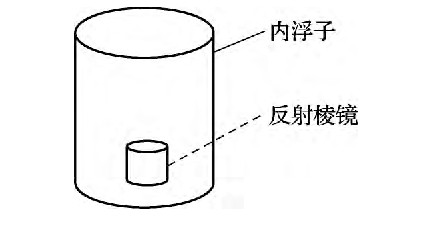
圖3 內浮(fú)子及全反射棱(léng)鏡安裝示意圖
2、控製係統概述:
液位計標準裝置的液位控製和液位測量由PLC控製(zhì)係統(tǒng)[4]進行遠程控製和現場數據(jù)采集。控製係統示意圖如圖4所示。
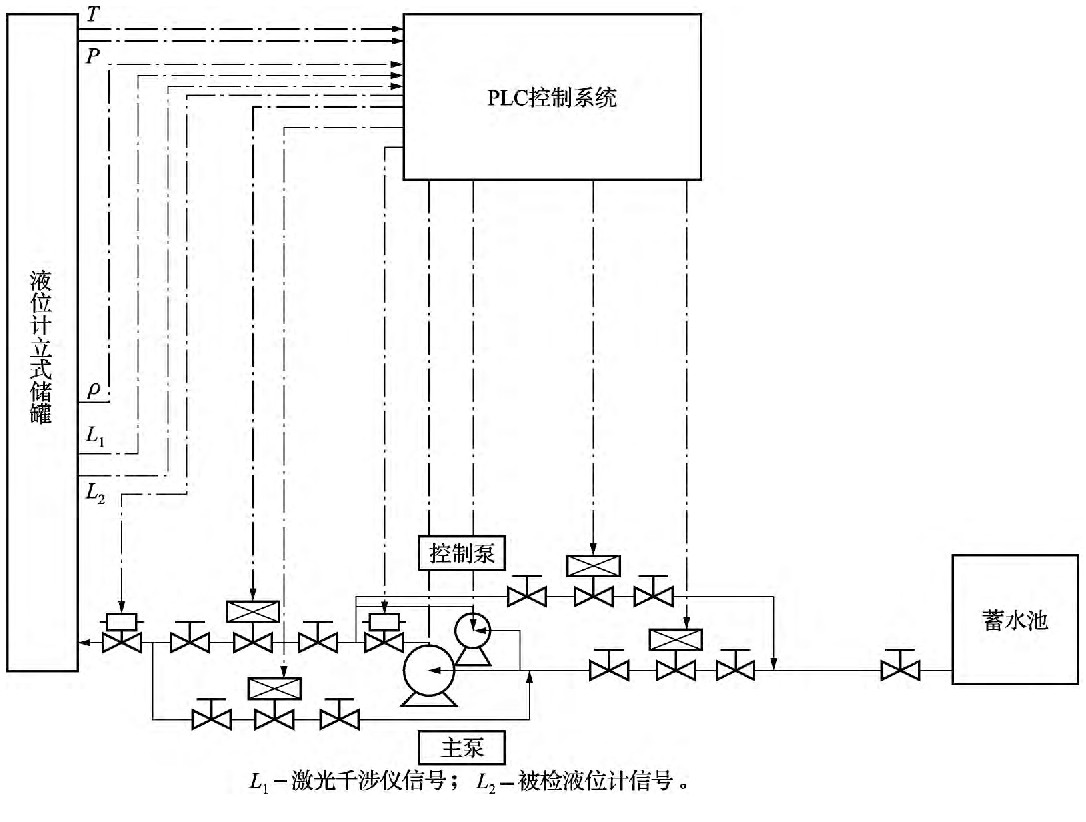
圖4 液位計標準裝置控製係統(tǒng)示意圖
其(qí)中立式儲罐頂部安裝激光幹涉儀和待檢液位計,二者的(de)測量值通過通信模塊傳回(huí)中控室。在液位變化過程中,PLC控製係統可(kě)以通過激光幹涉儀測(cè)量值(zhí)的反饋來控製主泵、控製泵、閥門進行工作。主(zhǔ)泵主要用(yòng)於液位的(de)粗略控製,當液位逼近設定液位值時,關閉主(zhǔ)泵,啟(qǐ)動控製(zhì)泵,由於控(kòng)製泵流量非常小,能夠比較(jiào)地控製液位,從而(ér)使立式儲(chǔ)罐液位達到***液位設(shè)定值。在液位上升和下降過程中,通(tōng)過遠(yuǎn)程切換閥門的開啟和閉合,能夠使測量介質(zhì)在蓄水池和立(lì)式儲罐間雙向運動,實(shí)現雙泵雙向,從而實現液位設(shè)定值的(de)雙向控製。
3、不確定度評定:
根據前文描述,液位計標準裝置在全(quán)量(liàng)程範圍(wéi)內均勻選取幾個液位測(cè)量點,通過標準裝(zhuāng)置的測量值和待檢液位計測量值之間(jiān)的差值,得出全量程(chéng)範(fàn)圍內待檢液位計的***大(dà)允許誤差。
3.1、數學模型:
液(yè)位計標準裝置的數學(xué)模型為:
式中:Δ為特定液位點誤差;y'為待檢液位計示(shì)值;x為標準裝置測量值。
3.2、測(cè)量不確定度的主要來源:
3.2.1、液位(wèi)計引(yǐn)入的標準不確定度(dù)u (y'):
液位計(jì)的不確定度[5]主要是由液位(wèi)計重複性、分辨力引入的標準不確(què)定度,重複性的不確定(dìng)度采用A類方法評(píng)定,分辨力的不(bú)確定度采(cǎi)用B類方法進(jìn)行(háng)評定,液位計的重複性可以通過連續測量得到,按照檢定規程[6]要求(qiú),在全量(liàng)程範圍內選擇一固定的液位測量點,10次讀(dú)取(qǔ)待檢液位計的測量(liàng)值為10.310 1、10.310 9、10.310 2、10.310 6、10.311 1、10.310 9、10.310 2、10.310 1、10.309 4、10.310 2 m。
根據(jù)貝(bèi)塞爾公式,得(dé)出(chū)標準不(bú)確定(dìng)度:

液位計分辨力為0.1 mm,在(zài)此區(qū)間內可認為均勻分布,包含因子k取(qǔ),則:
液位計引入的標準不確定度

3.2.2、液位計標準裝置引入的標準(zhǔn)不(bú)確定度u (h0):
液位計標準裝置誤差引入的標準不確(què)定(dìng)度u (h0) 采用B類方法進(jìn)行評(píng)定[6]。

3.2.3、合成(chéng)標準不確定(dìng)度計算:
數學模(mó)型:Δ=y'-x
靈(líng)敏係數:
各標(biāo)準不確定度分量匯總如表1所示。
因而合成標準不確定度計(jì)算如下:
輸入量(liàng)y'、x彼(bǐ)此獨立互不相關,所以合成(chéng)標準(zhǔn)不(bú)確定度可按下式計算得到:
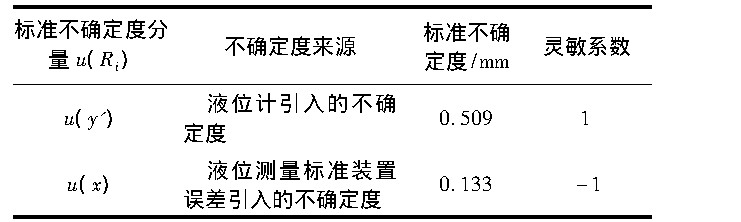
表1 標(biāo)準不確定度匯總表

擴展不確(què)定度評定如下:
取包含因子k=2,液位計標準裝置測量結果的擴展不確定度為:

3.3 測量不確定度報告與表示
液位計標準裝(zhuāng)置測量結果的(de)擴展不(bú)確定度為:
4、結束語:
本文(wén)對(duì)液位計檢定裝置的組成、控製係統以及測量結果的不確(què)定度進行了(le)說明和分析,得出本裝置(zhì)能夠對高精度液位計進行示值誤差(chà)方麵的檢定(dìng),並通過控製標(biāo)準裝置中的液位,能夠在量程範圍內(nèi)均勻的液位(wèi)點進行測量工作,基本(běn)覆蓋待檢(jiǎn)液位計的(de)量程。本檢定裝置的優點主要體現在測量精度高、係統穩定性好,並能夠真實模擬(nǐ)液(yè)位計的現場安(ān)裝環(huán)境和工作狀態,與傳統(tǒng)的實驗室橫向檢定(dìng)大量程液位計相比,能夠更加真實地再現液位計(jì)的具體(tǐ)工作環境,並為(wéi)液位計(jì)的離(lí)線(xiàn)檢定係統的研發提供了(le)啟示和技術支(zhī)撐。
- 2023-09-20
北京恒升(shēng)偉業 HSIN685智能數字壓(yā)力校驗儀 - 2025-02-08
恒升偉業(yè)壓力傳感器標定係統:守護飛行員安全的科技後(hòu)盾 - 2025-01-21
北京恒升偉業溫度檢定係(xì)統成功入駐四川眾邦新材料 - 2024-11-04
航(háng)空發動機製造中的溫度計量:熱電偶(ǒu)檢定係統 - 2024-11-04
氯堿生產中的壓力校驗利器:壓力校驗台 - 2024-11-04
紡織業壓力儀(yí)表校準:智能數字壓力校驗儀 - 2024-11-01
熱電偶檢定爐:工業熱電偶校準的關鍵 - 2024-11-01
航空發動機運維中的溫度校驗儀和檢定係統 - 2024-11-01
壓力變送器的維護保養與壓力校驗儀的重要性 - 2024-11-01
壓力變(biàn)送器與(yǔ)校驗設備在暖通空調(diào)係統中的應用